OpenROVテストダイビング(耳浦海岸)
前回のダイブで浸水してしまった水中ドローンのOpenROVですがやっと補修してテストダイビングしてきました。 場所は西ノ島の耳浦海岸です。
浅瀬なせいかあんまり魚はいませんでした...。
0:00- 水ぎわ石ころゾーンはちっこい魚がうようよしています。
3:50- 砂地ゾーンに入ってからは魚がほとんどいません。火星探査機の気分です。
9:50- メバルっぽい魚が出現
11:36- 長めの魚が出現
13:00- 画面手前から足の長いクラゲが出現
補修ついでにいくつか改良してます。
水漏れ補修
水漏れ箇所の特定は真空ポンプを使います。

メインチューブの片方のフタ周辺を水の中に沈めて、反対側のフタの空気穴に真空ポンプのチューブをつなぎ、ポンプでシュコシュコとやって-50kPa程度まで空気を抜きます。するとチューブ内部の水漏れ箇所から水が侵入してきます。

メインチューブのフタには十数本のケーブル束を通す穴があり、エポキシ系接着剤でポッティング(ケーブルと穴の隙間を接着剤で埋める加工)してありますが、ケーブルの束の中心あたりから水漏れしていました。ここはエポキシ系接着剤の粘度だと浸透しにくく、水漏れしやすいポイントだと思います。いったん粘度の低い接着剤でケーブル間のすきまを埋めたあと、再度エポキシ系接着剤でポッティングしました。
ちなみに、手元にあるOpenROVはver2.7ですが、最新のver2.8ではこのあたりが改良されており、メインチューブのケーブル穴がコネクタ直付けになったのでポッティングがしやすくなっているようです。
浮力調整
普通に組み立てた状態だと、淡水向けの浮力になっているため、海で使用する場合は適切なおもりを追加して中性浮力の状態にしてやる必要があります。本当は左右のバランスを考慮して、同じ重さの鉛などを左右に足すべきですが、適当なおもりがなかったので今回は海岸の石を括りつけて代用しました...。
PC-I/Fコンバータ間配線の無線化
OpenROVの操作は基本的にはPCのブラウザから行います。PCからコネクタ変換ボックスにはUSBケーブル(下図の青線)とLANケーブル(下図の赤線)で接続、変換ボックスからはツイストペアケーブル(2本の電線を撚り合わせたもの、下図の緑線)でOpenROVに接続されます。
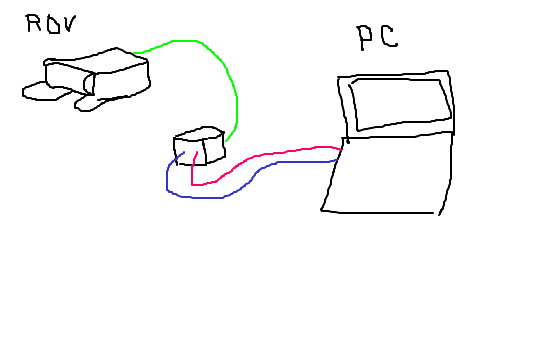
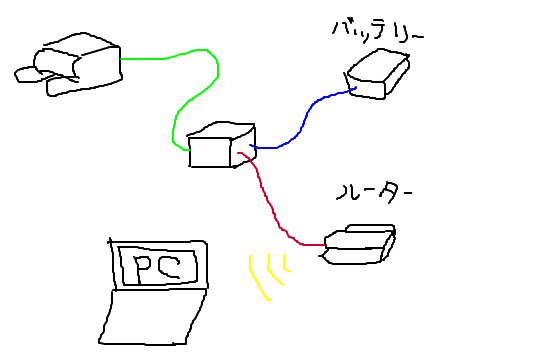
USBケーブルはOpenROVの制御基板であるBeagleBoneの電源供給用で、LANケーブルがブラウザとBeagleBone上のWebサーバの通信用です。実運用上、PCはなるべく水際から離しておきたいので、USBケーブルは防水仕様のモバイルバッテリー、LANケーブルは無線LANポケットルーターに接続して無線化しました。ちなみに、図に書いてませんがルーターの電源はUSB端子なのでモバイルバッテリーから取れます。
モバイルバッテリーは以下の製品を使いました。お手頃価格ですが作りはしっかりしていて良いです。
無線LANポケットルーターは以下の製品を使いました。設定なしでお手軽接続でき、いざという時は有線LAN接続もできるのが秀逸です。
アクションカム搭載
搭載場所をメインチューブの前にするか、本体の上面にするかでちょっと悩みました。メインチューブ前だと内蔵カメラの視界が遮られて操作しにくくなるし、本体上面だと水の抵抗を受けやすいのと機体のバランスが悪くなりそうです。
今回はメインチューブ前に固定するお手軽な方法がなかったので、とりあえず本体上面にビニールテープで仮設置しましたが、上下移動用スラスターに干渉しないように気をつけて設置する必要がありました。一応カメラの脱落防止用にワイヤーもつけておきました。
いずれは3Dプリンタで専用のマウンタを作りたいところです。